If you've been following my multi-protocol Industrial Ethernet series of blog posts, you'll find that I'm the iron powder for the programmable real-time unit and the Industrial Communications Subsystem (PRU-ICSS), a programmable interface within the SitaraTM processor. In this blog post, I would like to talk about another application of PRU-ICSS that helps integrate the digital position encoder main interface of your choice into the Sitara processor.
First, let's look at the system-level block diagram of the position encoder - see Figure 1. Applications such as servo drives are often equipped with motors that incorporate digital position feedback encoders. The position code acts as a sensor that accurately measures the angle of the motor shaft (in degrees) or the distance of the linear axis (in microns).
In these systems, the position encoder is responsible for reading the angle of the motor shaft and providing the information to the position encoder master via a digital position encoder protocol. The application processor's Field Oriented Control (FOC) algorithm is responsible for further processing of the angle, including motor phase current measurements, to calculate new values ​​for pulse width modulation (PWM) peripherals.
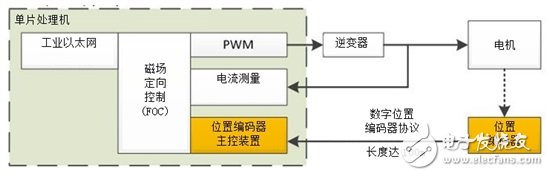
Figure 1: Integrated servo drive with position encoder main interface
The distance between the position encoder and the position encoder master can be as long as 100 m. The digital position encoder protocol operates on an RS-485 based interface to create a robust communication channel.
Like Industrial Ethernet, different encoder vendors have developed a number of position encoder protocol standards for you to transfer position data. The challenge for single-chip driver developers is to select and integrate the correct digital encoder protocol standard based on the encoder and motor supplier. The three most commonly used position encoder protocol standards are EnDat 2.2, BiSS C and High Performance Interface Digital Servo Link (HIPERFACE) DSL.
Let's take a look at the history and characteristics of these three position encoder protocol standards.
EnDat 2.2: The EnDat interface was developed by the German company Heindenhain. The original version of EnDat used analog interface signals. With the introduction of EnDat 2.2, the encoder interface has become a digital bidirectional interface for both incremental and absolute encoders, using the RS-485 differential signaling standard. EnDAT uses two differential signals to transmit position data: clock (one-way) and data (bidirectional). Establishing communication between the EnDat master and the encoder device requires six wires, including the encoder supply line.
HIPERFACE DSL: Another German company, SICK, has developed the HIPERFACE DSL, which uses the RS-485 differential signaling standard. It operates at a fixed frequency of 9.375MHz and supports cables up to 100m long. The advantage of HIPERFACE DSL is its ability to implement a two-wire interface for two-way communication between the HIPERFACE DSL main control unit and the HIPERFACE DSL encoder unit. These two lines are also responsible for powering the encoder; therefore, only two wires are required between the main control unit interface and the encoder unit, which can significantly reduce wiring costs.
BiSS C: iC-Haus developed an open two-way BiSS interface in 2002. The BiSS interface is compatible with the Unidirectional Synchronous Serial Interface (SSI) and its RS-485 interface supports up to 10MHz. The BiSS C standard supports both point-to-point configuration between the BiSS master and encoder devices, as well as multiple sensor and actuator buses to a BiSS master control unit. The interface includes a shared clock and control data (MA+/MA-) signal from the BiSS master control device to the encoder device and shared sensor data and control data (SL+/SL–) signals from the encoder device to the master control device. There are a total of six wires between the BiSS main control unit and the encoder unit, including the encoder supply line.
Each digital position encoder protocol standard traditionally requires a specific hardware implementation in a field programmable gate array (FPGA), programmable logic device (PLD), or application specific integrated circuit (ASIC). However, external device components are not required when integrating the position encoder master control protocol into the Sitara processor application via the PRU-ICSS peripheral. The AM437x processor has two PRU-ICSS peripherals. You can use one for the data encoder master control protocol, such as EnDAT 2.2, HIPERFACE DSL and BiSS C, and the other to run the Industrial Ethernet protocol.
The multi-protocol position encoder main interface has been released. See the multi-protocol digital position encoder main interface reference design (TIDEP0057) in the PRU-ICSS application AM437x, where the ARM equipped with the PRU-ICSS peripheral is responsible for detecting the connected position encoder. Types of. See Figure 2.
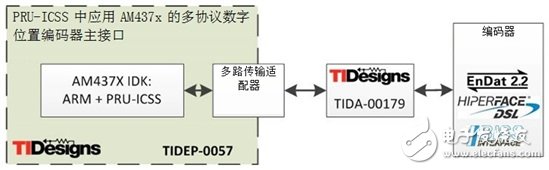
Figure 2: Multi-Protocol Position Encoder Main Interface with PRU-ICSS
The second reference design, the single-chip driver for industrial communication and motor control (TIDEP0025), and the system method for integrating a single-chip driver, is shown in Figure 1. In this reference design, the position encoder main interface uses EnDat 2.2, one on the PRU-ICSS of the AM437x for communication with the position encoder, and the other PRU-ICSS for EtherCAT slave communication support.
As an extremely flexible peripheral, PRU-ICSS can integrate the complex functions previously provided in external ASICs and FPGAs. As mentioned in this blog post, the PRU-ICSS of the Sitara processor family integrates a number of position encoder main interfaces for position encoder protocols, thus eliminating these external components. Integrating the position encoder main interface with PRU-ICSS into the Sitara processor saves board space, component costs and builds a high-performance throughput system.
other information
Order the AM437x Industrial Development Kit to begin using the Position Encoder Protocol.
Explore the RS-485 interface analog solution with the Universal Digital Interface Reference Design (TIDA-00179) for absolute position encoders.
Learn more about the industrial communication protocols supported by other TI processors.
Read the single-chip driver solution available for the AM437x processor
Download TI designs related to other position encoders.
Read the Position Encoder Series blog post to learn more about the design information for the position encoder interface.
SHAOXING COLORBEE PLASTIC CO.,LTD , https://www.colorbeephoto.com