I. Project introduction
1. Project source:
When the mobile robot is in a simple or complex, static or dynamic, known or unknown environment, the primary task of the robot is to perceive the environment, avoid obstacles, and then consume with minimal or small (time, space or energy) To complete your own tasks, the basis of this process is path planning. The so-called path planning refers to how the robot searches for an optimal or sub-optimal path from the initial position to achieve its own purpose according to certain performance indicators. Path planning is an important field in robot research. Usually path planning includes two levels: one is the path planning of the joint robot space; the other is the mobile robot path planning. The former has more degrees of freedom, and now it is more used in industrial robots; while the latter has developed extremely rapidly in the past decade, and its research content is also broader. We choose the latter as the research content.
In fact, the path planning method of mobile robots is based on different environments and specific mobile robot control architectures. In different environments, different path planning methods have their own advantages for mobile robots with different performances. And disadvantages. At present, there is no planning method suitable for any system in various environments, and sometimes different planning methods are combined with the advantages of both parties to achieve better planning results.
Second, the project plan implementation content
Analyze general path planning algorithms to understand design requirements;
Inductive integration of traditional and intelligent robot path planning algorithms, and give corresponding procedures;
Through the environment modeling method, the design method of the robot path planning simulation system platform is proposed to solve the problems of collection and representation of environment, robot, obstacles and paths;
Establish an algorithm interface for inputting and outputting environmental information and path planning algorithms;
Realize the design of the robot path planning simulation platform;
The path navigation algorithm is tested by making a smart car (AGV) object and passing a navigation line (special path planning).
III. Expected results and research results obtained at the current stage
1. Expected research results:
Research and analyze the mobile robot path planning algorithm to provide the basis for the development of mobile robot systems;
Improve or implement partial path planning algorithms and simulate with software such as Matlab or MSRS;
Design and manufacture a smart car (AGV), design a navigation line algorithm, and perform physical verification to verify the achievability of the algorithm;
Establish environmental models, obstacle models, robotic physical models, and various sensor models as the underlying framework of the policy platform;
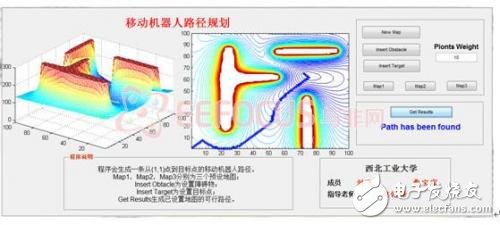
Developed a mobile robot path planning simulation system platform;
Write a summary report and try to publish two core journal articles;
2. Research results obtained at this stage:
Outcome 1: Robot Path Planning Algorithm Section
During the period from December 2011 to March 2011, we studied different path planning algorithms and used Matlab software to program and simulate them. We also carried out data analysis and research on the simulation results, and different algorithms. The comparisons were made and their respective advantages and disadvantages were proposed.
Below we select several well-executed algorithms to show the results, namely A* algorithm, artificial potential field algorithm and so on. And we have further realized the obstacle avoidance and navigation line tracking algorithm, which laid the foundation for future research work.
The appendix is ​​the flow of the A* algorithm. For the models and processes of other algorithms, see the development documents.
1, A* algorithm matlab simulation results
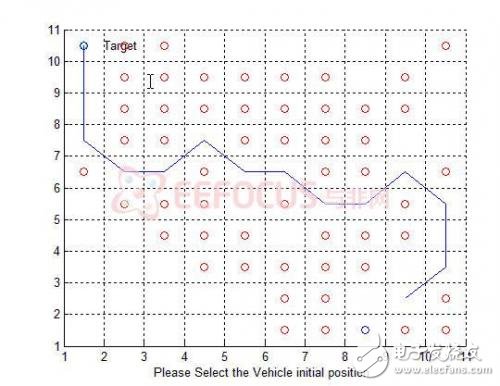
The figure above shows the path planning result using the A* algorithm. The red dot in the figure indicates the obstacle and the blue dot indicates the starting point. It can be seen from the figure that the planning effect of the A* algorithm is better.
2, artificial potential field algorithm matlab simulation results
The basic principle of the artificial potential field method is to assign a potential field value at each point in the discrete environment where the robot is located, and the value is the superposition of the gravity of the target point and the repulsive force of the obstacle.
And is the distance influence factor, the distance from the target, and the distance from the obstacle. Therefore, the path planning of the robot is to reach the target point from the starting point along the direction of the fastest drop of the potential field.
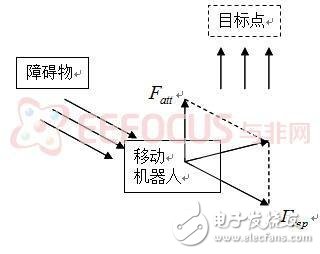
Artificial potential field force model diagram
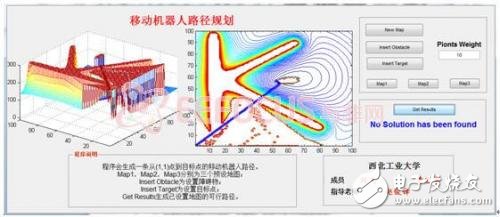
The advantage of this method is that it is simple in mathematical description, which can make the robot quickly avoid the sudden obstacles and has good real-time performance, so it is often used in the design of local path planning.
However, the artificial potential field method has many disadvantages:
As shown in the following figure, an incorrect result will result:
New Products
SHENZHEN CHONDEKUAI TECHNOLOGY CO.LTD , https://www.siheyidz.com